pytorch 搭建神經網路的實現
1 數據
(1)導入數據
我們以Fashion-MNIST數據集為例,介紹一下關於pytorch的數據集導入。
PyTorch域庫提供許多預加載的數據集(如FashionMNIST),這些數據集是torch.utils.data.Dataset的子類,並實現瞭特定於指定數據的功能。
Fashion-MNIST是Zalando文章中的圖像數據集,包含60,000個訓練示例和10,000個測試示例。每個示例包括28×28灰度圖像和來自10個類中的一個的關聯標簽。
import torch
from torchvision import datasets
from torchvision.transforms import ToTensor
import matplotlib.pyplot as plt
import os
os.environ['KMP_DUPLICATE_LIB_OK'] = 'TRUE' # 沒有這句會報錯,具體原因我也不知道
training_data = datasets.FashionMNIST(
root="../data",
train=True,
download=True,
transform=ToTensor()
)
test_data = datasets.FashionMNIST(
root="../data",
train=False,
download=True,
transform=ToTensor()
)
輸出(下面的截圖不完整)
我們使用以下參數加載FashionMNIST數據集:
root是存儲訓練/測試數據的路徑,
train指定訓練或測試數據集,
download=True 如果數據集不存在於指定存儲路徑,那麼就從網上下載。
transform和target_transform用於指定屬性和標簽轉換操作,這裡所說的“轉換操作”,通常封裝在torchvision.transforms中,因此通常需要導入torchvision.transforms,或者導入這個包中的操作
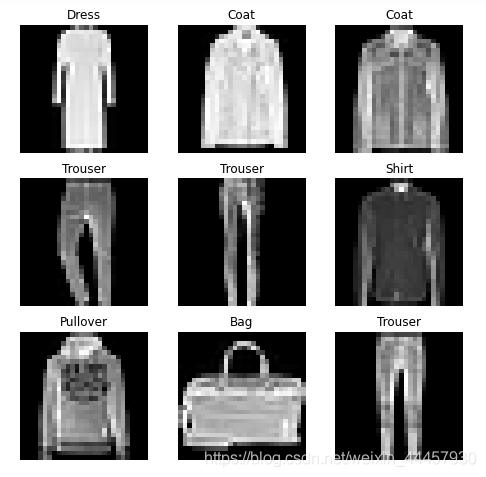
(2)數據集可視化
我們可以像列表一樣手動索引數據集:training_data[index]。我們使用matplotlib來可視化訓練數據中的一些示例。
labels_map = {
0: "T-Shirt",
1: "Trouser",
2: "Pullover",
3: "Dress",
4: "Coat",
5: "Sandal",
6: "Shirt",
7: "Sneaker",
8: "Bag",
9: "Ankle Boot",
}
figure = plt.figure(figsize=(8, 8))
cols, rows = 3, 3
for i in range(1, cols * rows + 1):
# 從0-len(training_data)中隨機生成一個數字(不包括右邊界)
sample_idx = torch.randint(len(training_data), size=(1,)).item()
img, label = training_data[sample_idx] # 獲得圖片和標簽
figure.add_subplot(rows, cols, i)
plt.title(labels_map[label])
plt.axis("off") # 坐標軸不可見
plt.imshow(img.squeeze(), cmap="gray") # 顯示灰度圖
plt.show()
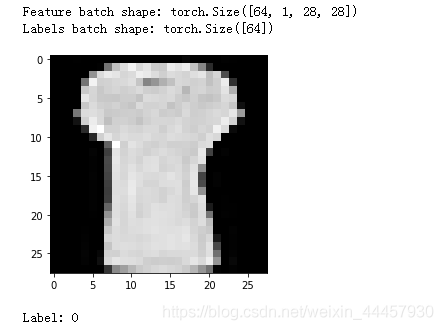
輸出
上面的程序中,有兩個地方指的註意,一個是可以求training_data的長度,另一個可以通過索引獲得單個樣本,當然這裡的樣本已經被轉換成瞭張量,如下圖所示

(3)為自己制作的數據集創建類
如果要導入自己制作的數據集,需要編寫一個類,這個類用於繼承torch.utils.data中的Dataset類。自制的數據集類必須實現三個函數:init、len__和__getitem,分別是初始化類,求長度len(obj),通過索引獲得單個樣本(像列表一樣)。
import os
import pandas as pd
from torch.utils.data import Dataset
from torchvision.io import read_image
class CustomImageDataset(Dataset):
def __init__(self, annotations_file, img_dir, transform=None, target_transform=None):
self.img_labels = pd.read_csv(annotations_file)
self.img_dir = img_dir
self.transform = transform
self.target_transform = target_transform
def __len__(self):
return len(self.img_labels)
def __getitem__(self, idx):
img_path = os.path.join(self.img_dir, self.img_labels.iloc[idx, 0])
image = read_image(img_path)
label = self.img_labels.iloc[idx, 1]
if self.transform:
image = self.transform(image)
if self.target_transform:
label = self.target_transform(label)
return image, label
具體細節可以在pytorch的官網教程:https://pytorch.org/tutorials/beginner/basics/data_tutorial.html
Creating a Custom Dataset for your files
(4)數據集批處理
上面的程序中,雖然可以使用索引獲得樣本,但一次隻能獲得單個樣本,無法像列表、張量、numpy切片一樣一次切出多個

而在訓練模型的時候,我們希望能夠批處理,即一次處理若幹個樣本,同時,我們希望數據在每次遍歷完之後打亂一次,以減少過擬合,並使用Python的多處理來加快數據提取。
pytorch中,專門有一個類可以實現上述功能,即torch.utils.data.DataLoader
下面的程序是將數據集導入到DataLoader中
from torch.utils.data import DataLoader train_dataloader = DataLoader(training_data, batch_size=64, shuffle=True) # train_dataloader是一個DataLoader類的對象 test_dataloader = DataLoader(test_data, batch_size=64, shuffle=True)
training_data和test_data就是前面導入的數據集,由於我們指定瞭batch的大小是64,因為我們指定瞭shuffle=True,所以在遍歷所有batch之後,數據將被打亂。
此時training_data和test_data仍然不是可迭代對象,還需要將其變成可迭代對象,可以使用iter函數將每一個batch轉化成可迭代對象,或者enumerate函數將其的每個batch帶上序號變成元組
用iter函數
for batch_index, (features, label) in enumerate(train_dataloader):
print(batch_index)
print(f"Feature batch shape: {features.size()}")
print(f"Labels batch shape: {label.size()}")
img = features[0].squeeze()
label = label[0]
plt.imshow(img, cmap="gray")
plt.show()
print(f"Label: {label}")
break
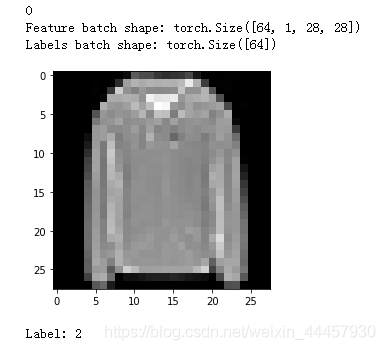
輸出
上面的程序中,train_features, train_labels都是包含64個樣本的張量
用enumerate函數
for batch_index, (features, label) in enumerate(train_dataloader):
print(batch_index)
print(f"Feature batch shape: {features.size()}")
print(f"Labels batch shape: {label.size()}")
img = features[0].squeeze()
label = label[0]
plt.imshow(img, cmap="gray")
plt.show()
print(f"Label: {label}")
break
(5)數據預處理
數據並不總是以訓練機器學習算法所需的最終處理形式出現,因此我們需要對數據進行一些變換操作,使其適合於訓練。
所有的TorchVision數據集都有兩個參數,它們接受包含轉換邏輯的可調用對象:(1)transform用於修改特性,(2)target_transform用於修改標簽
torchvision.transforms模塊提供瞭多種常用的轉換,這裡我們介紹一下ToTensor和Lambda。
為瞭進行訓練,我們需要將FashionMNIST中的特征轉化為normalized tensors,將標簽轉化為One-hot編碼的張量。為瞭完成這些變換,我們使用ToTensor和Lambda。
import torch
from torchvision import datasets
from torchvision.transforms import ToTensor, Lambda
ds = datasets.FashionMNIST(
root="data",
train=True,
download=True,
transform=ToTensor(),
target_transform=Lambda(lambda y: torch.zeros(10, dtype=torch.float).scatter_(dim=0, index=torch.tensor(y), value=1))
)
ToTensor將PIL圖像或NumPy ndarray轉換為FloatTensor,並將圖像的像素值(或者灰度值)縮放到[0, 1]區間
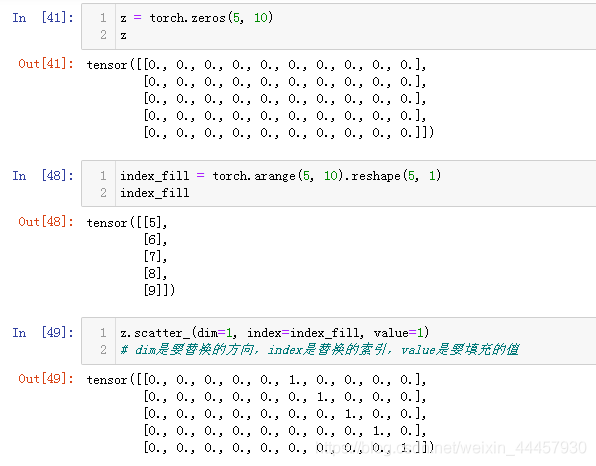
Lambda可以用於任何用戶定義的lambda函數,在這裡,我們定義一個函數來將整數轉換為一個one-hot編碼張量,首先建立一個長度為10的0張量(之所以為10,是因為有10個類別),然後調用scatter_函數,把對應的位置換成1。scatter_函數的用法如下:
更多torchvision.transforms的API詳見:https://pytorch.org/vision/stable/transforms.html
2 神經網絡
神經網絡由對數據進行操作的層/模塊組成,torch.nn提供瞭構建的神經網絡所需的所有構建塊。PyTorch中的每個模塊都繼承瞭nn.Module,神經網絡本身就是一個模塊,它由其他模塊(層)組成,這種嵌套結構允許輕松構建和管理復雜的體系結構。
在下面的小節中,我們將構建一個神經網絡來對FashionMNIST數據集中的圖像進行分類。
(1)定義神經網絡類
我們通過繼承nn.Module來定義我們的神經網絡類,並在__init__中初始化神經網絡層,每一個nn.Module的子類在forward方法中繼承瞭對輸入數據的操作。
在初始化方法中搭建網絡結構
class NeuralNetwork(nn.Module):
def __init__(self):
super(NeuralNetwork, self).__init__()
self.flatten = nn.Flatten() # 打平
self.linear_relu_stack = nn.Sequential(
nn.Linear(28*28, 512), # 線性層
nn.ReLU(), # 激活層
nn.Linear(512, 512),
nn.ReLU(),
nn.Linear(512, 10),
nn.ReLU()
)
def forward(self, x):
x = self.flatten(x) # 打平層
logits = self.linear_relu_stack(x) # 線性激活層
return logits
We create an instance of NeuralNetwork, and print its structure.
我們可以建立一個NeuralNetwork(即剛剛定義的類)的實例,並打印它的結構
model = NeuralNetwork() print(model)
輸出
NeuralNetwork(
(flatten): Flatten(start_dim=1, end_dim=-1)
(linear_relu_stack): Sequential(
(0): Linear(in_features=784, out_features=512, bias=True)
(1): ReLU()
(2): Linear(in_features=512, out_features=512, bias=True)
(3): ReLU()
(4): Linear(in_features=512, out_features=10, bias=True)
(5): ReLU()
)
)
使用模型時,我們將輸入數據傳遞給它,這將執行模型的forward方法,以及一些背後的操作。註意:不要直接調用model.forward() !
定義好我們自己的神經網絡類之後,我們可以隨機生成一個張量,來測試一下輸出的size是否符合要求
每個樣本傳入模型後會得到一個10維的張量,將這個張量傳入nn.Softmax的實例中,可以得到每個類別的概率
X = torch.rand(1, 28, 28) # 生成一個樣本
logits = model(X) # 將樣本輸入到模型中,自動調用forward方法
print(logits.size())
pred_probab = nn.Softmax(dim=1)(logits) # 實例化一個Softmax對象,並通過對象調用
y_pred = pred_probab.argmax(1) # 獲得概率最大索引
print(f"Predicted class: {y_pred}")
輸出
torch.Size([1, 10])
Predicted class: tensor([8])
(2)神經網絡組件
上面搭建神經網絡時,我們使用瞭打平函數、線性函數、激活函數,我們來看看這些函數的功能
打平層
input_image = torch.rand(3,28,28) print(input_image.size())
輸出
torch.Size([3, 28, 28])
線性層
layer1 = nn.Linear(in_features=28*28, out_features=20) hidden1 = layer1(flat_image) print(hidden1.size())
輸出
torch.Size([3, 20])
線性層其實就是實現瞭 y=w*x + b,其實是和下面的程序是等效的,但下面的程序不適合放在nn.Sequential中(但可以放在forward方法裡)
w = torch.rand(784, 20) b = torch.rand((1, 20)) hidden2 = flat_image @ w + b print(hidden2.size())
輸出
torch.Size([3, 20])
nn.Sequential是一個模塊容器類,在初始化時,將各個模塊按順序放入容器中,調用模型時,數據按照初始化時的順序傳遞。
例如:
seq_modules = nn.Sequential(
flatten, # 在nn.Sequential中可以調用其他模塊
layer1,
nn.ReLU(),
nn.Linear(20, 10)
)
input_image = torch.rand(3,28,28)
logits = seq_modules(input_image)
在nn.Sequential中可以調用其他模塊,nn.Sequential定義的模塊也可以被其他模塊調用
(3)模型參數
神經網絡中的許多層都是參數化的,也就是說,在訓練過程中會優化相關的權值和偏差,我們可以使用模型的parameters()或named_parameters()方法訪問所有參數。
model.parameters()返回的是一個參數生成器,可以用list()將其轉化為列表,例如
para_list = list(model.parameters())
# 將參數生成器轉換成列表之後,列表的第一個元素是w,第二個元素是b
print(type(para_list[0]))
print(f'number of linear_layers :{len(para_list)/2}')
print('weights:')
print(para_list[0][:2]) # 隻切出兩個樣本來顯示
print('bias:')
print(para_list[1][:2])
print('\nthe shape of first linear layer:', para_list[0].shape)
輸出
<class ‘torch.nn.parameter.Parameter’>
number of linear_layers :3.0
weights:
tensor([[ 0.0135, 0.0206, 0.0051, …, -0.0184, -0.0131, -0.0246],
[ 0.0127, 0.0337, 0.0177, …, 0.0304, -0.0177, 0.0316]],
grad_fn=<SliceBackward>)
bias:
tensor([0.0333, 0.0108], grad_fn=<SliceBackward>)the shape of first linear layer: torch.Size([512, 784])
named_parameters()方法返回參數的名稱和參數張量,例如:
print("Model structure: ", model, "\n\n")
for name, param in model.named_parameters():
print(f"Layer: {name} | Size: {param.size()} | Values : \n{param[:2]} \n")
# 隻切出前兩行顯示
輸出
Model structure: NeuralNetwork(
(flatten): Flatten(start_dim=1, end_dim=-1)
(linear_relu_stack): Sequential(
(0): Linear(in_features=784, out_features=512, bias=True)
(1): ReLU()
(2): Linear(in_features=512, out_features=512, bias=True)
(3): ReLU()
(4): Linear(in_features=512, out_features=10, bias=True)
(5): ReLU()
)
)
Layer: linear_relu_stack.0.weight | Size: torch.Size([512, 784]) | Values :
tensor([[ 0.0135, 0.0206, 0.0051, …, -0.0184, -0.0131, -0.0246],
[ 0.0127, 0.0337, 0.0177, …, 0.0304, -0.0177, 0.0316]],
grad_fn=<SliceBackward>)Layer: linear_relu_stack.0.bias | Size: torch.Size([512]) | Values :
tensor([0.0333, 0.0108], grad_fn=<SliceBackward>)Layer: linear_relu_stack.2.weight | Size: torch.Size([512, 512]) | Values :
tensor([[ 0.0338, 0.0266, -0.0030, …, -0.0163, -0.0096, -0.0246],
[-0.0292, 0.0302, -0.0308, …, 0.0279, -0.0291, -0.0105]],
grad_fn=<SliceBackward>)Layer: linear_relu_stack.2.bias | Size: torch.Size([512]) | Values :
tensor([ 0.0137, -0.0036], grad_fn=<SliceBackward>)Layer: linear_relu_stack.4.weight | Size: torch.Size([10, 512]) | Values :
tensor([[ 0.0029, -0.0025, 0.0105, …, -0.0054, 0.0090, 0.0288],
[-0.0391, -0.0088, 0.0405, …, 0.0376, -0.0331, -0.0342]],
grad_fn=<SliceBackward>)Layer: linear_relu_stack.4.bias | Size: torch.Size([10]) | Values :
tensor([0.0406, 0.0369], grad_fn=<SliceBackward>)
更多關於torch.nn的API請看:https://pytorch.org/docs/stable/nn.html
3 最優化模型參數
(1)超參數
在繪制計算圖之前,需要給出超參數,這裡說的超參數,指的是學習率、批大小、迭代次數等
learning_rate = 1e-3 batch_size = 64 epochs = 5
(2)損失函數
回歸問題一般用nn.MSELoss,二分類問題一般用nn.BCELoss,多分類問題一般用nn.CrossEntropyLoss,這裡FashionMNIST中,標簽有十個類別,因此這裡我們用nn.CrossEntropyLoss
# Initialize the loss function loss_fn = nn.CrossEntropyLoss()
(3)優化方法
這裡我們用隨機梯度下降,即每傳入一個樣本,更新一次參數
optimizer = torch.optim.SGD(model.parameters(), lr=learning_rate)
更多優化方法的API,可以看:https://pytorch.org/docs/stable/optim.html
常用的優化算法原理,可以看:https://zhuanlan.zhihu.com/p/78622301
4 模型的訓練與測試
(1)訓練循環與測試循環
每個epoch包括兩個主要部分:
訓練循環(train_loop)——遍歷訓練數據集並嘗試收斂到最優參數。
驗證/測試循環(test_loop)——遍歷測試數據集以檢查模型性能是否正在改善。
我們先把上述兩個過程封裝成函數
def train_loop(dataloader, model, loss_fn, optimizer):
size = len(dataloader.dataset)
for batch, (X, y) in enumerate(dataloader):
# Compute prediction and loss,下面兩步相當於繪制計算圖
pred = model(X)
loss = loss_fn(pred, y)
# Backpropagation
optimizer.zero_grad() # 梯度信息清零
loss.backward() # 反向傳播
optimizer.step() # 一旦有瞭梯度,就可以更新參數
if batch % 100 == 0:
loss, current = loss.item(), batch * len(X)
print(f"loss: {loss:>7f} [{current:>5d}/{size:>5d}]")
def test_loop(dataloader, model, loss_fn):
size = len(dataloader.dataset)
num_batches = len(dataloader)
test_loss, correct = 0, 0
with torch.no_grad(): # 禁用梯度跟蹤,後面會講
for X, y in dataloader:
pred = model(X)
test_loss += loss_fn(pred, y).item()
correct += (pred.argmax(1) == y).type(torch.float).sum().item()
test_loss /= num_batches
correct /= size
print(f"Test Error: \n Accuracy: {(100*correct):>0.1f}%, Avg loss: {test_loss:>8f} \n")
現在可以進行訓練瞭
for t in range(epochs):
print(f"Epoch {t+1}\n-------------------------------")
train_loop(train_dataloader, model, loss_fn, optimizer)
test_loop(test_dataloader, model, loss_fn)
print("Done!")
輸出
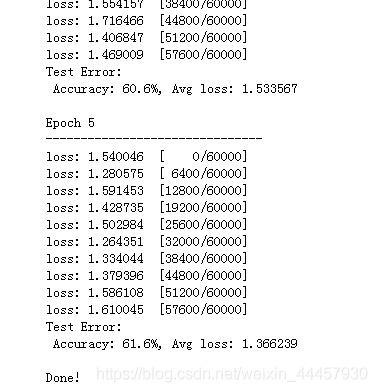
我們可以寫一段代碼,看看預測的圖片對不對
test_features, test_labels = next(iter(test_dataloader))
logits = model(test_features[0])
pred_probab = nn.Softmax(dim=1)(logits)
pred = pred_probab.argmax(1)
img = test_features[0].squeeze() # 將長度為1的維度去掉
true_label = test_labels[0]
plt.imshow(img, cmap="gray")
plt.show()
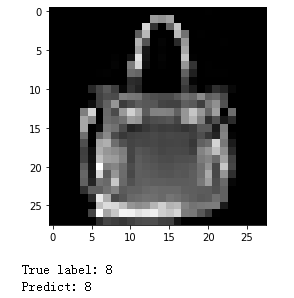
print(f"True label: {true_label}")
print(f"Predict: {pred.item()}")
輸出
(2)禁用梯度跟蹤
在上面的測試循環中,使用瞭torch.no_grad()方法,在表示所在的with塊不對梯度進行記錄。
默認情況下,所有requires_grad=True的張量(在創建優化器的時候,內部就把裡面的參數全部設置為瞭requires_grad=True)都跟蹤它們的計算歷史並支持梯度計算。但是,在某些情況下,我們並不需要這樣做,例如,測試的時候,我們隻是想通過網絡進行正向計算。我們可以通過使用torch.no_grad()塊包圍計算代碼來停止跟蹤計算:
z = torch.matmul(x, w)+b
print(z.requires_grad)
with torch.no_grad():
z = torch.matmul(x, w)+b
print(z.requires_grad)
輸出
True
False
禁用梯度跟蹤主要用於下面兩種情況:
(1)將神經網絡中的一些參數標記為凍結參數,這是對預先訓練過的網絡進行微調的一個常見的場景
(2)當你隻做正向傳遞時,為瞭加快計算速度,因為不跟蹤梯度的張量的計算會更有效率。
5 模型的保存、導入與GPU加速
(1)模型的保存與導入
PyTorch模型將學習到的參數存儲在一個內部狀態字典中,稱為state_dict,我們可以通過torch.save()將模型的參數保存到指定路徑。
保存瞭模型的參數,還需要保存模型的形狀(即模型的結構)
# 保存模型參數 torch.save(model.state_dict(), './model_weights.pth') # 保存模型結構 torch.save(model, './model.pth')
導入模型時,需要先導入模型的結構,再導入模型的參數,代碼如下:
# 導入模型結構
model_loaded = torch.load('./model.pth')
# 如果原來的model在cuda:0上,那麼導入之後,model_loaded也在cuda:0上
# 導入模型參數
model_loaded.load_state_dict(torch.load('model_weights.pth'))
因為model是NeuralNetwork類的一個對象,所以在導入狀態前,必須先有一個NeuralNetwork對象,要麼實例化一個,要麼通過導入結構torch.load(‘./model.pth’)導入一個.
torch.load直接導入模型,不是特別推薦,原因有以下兩點:
(1)如果A.py文件中的程序保存瞭model.pth,如果文件B.py想讀取這個模型,則不能直接用torch.load導入模型結構,必須先實例化一個NeuralNetwork對象,要麼從A.py或者從其他文件中把NeuralNetwork類給導進來,要麼這裡重寫一個與A.py中一模一樣的NeuralNetwork類,類名也要一樣,否則報錯。
# 實例化一個NeuralNetwork對象
model_loaded = NeuralNetwork() # model_loaded默認是CPU中
# 導入模型參數
model_loaded.load_state_dict(torch.load('./gdrive/MyDrive/model_weights.pth'))
(2)如果用torch.load導入模型,當我們在cuda:0上訓練好一個模型並保存時,讀取出來的模型也是默認在cuda:0上的,如果訓練過程的其他數據被放到瞭如cuda:1上,則會報錯。而實例化創建模型,由於.load_state_dict可以跨設備,則無論原來的模型在什麼設備上,都不妨礙把參數導入到新創建的模型對象當中。
綜合上面兩點,torch.load慎用,最好是先實例化後再導入模型狀態。
我們可以用導入的模型做預測
test_features, test_labels = next(iter(test_dataloader))
logits = model_loaded(test_features[0]) # 使用導入的模型
pred_probab = nn.Softmax(dim=1)(logits)
pred = pred_probab.argmax(1)
img = test_features[0].squeeze() # 將長度為1的維度去掉
true_label = test_labels[0]
plt.imshow(img, cmap="gray")
plt.show()
print(f"True label: {true_label}")
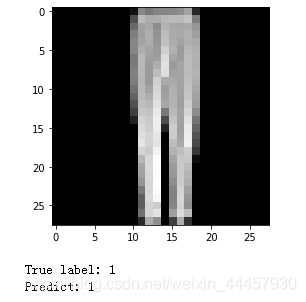
print(f"Predict: {pred.item()}")
輸出
(2)GPU加速
默認情況下,張量和模型是在CPU上創建的。如果想讓其在GPU中操作,我們必須使用.to方法(確定GPU可用後)顯式地移動到GPU。需要註意的是,跨設備復制大張量在時間和內存上開銷都是很大的!
# We can move our tensor to the GPU if available
device = 'cuda' if torch.cuda.is_available() else 'cpu'
print('Using {} device'.format(device))
輸出
Using cuda device
在初始化模型時,可以將模型放入GPU中
model = NeuralNetwork().to(device)
對於張量,可以在創建的時候指定為在GPU上創建,也可以在創建後轉移到GPU當中
X = torch.rand(1, 28, 28, device=device) # 創建時指定設備 Y = torch.rand(10).to(device) # 創建後轉移
當然,張量和模型也能從GPU轉移到CPU當中,我們可以用.device()來查看張量所在設備
另外,需要註意的是,如果需要將模型送到GPU當中,必須在構建優化器之前。因為CPU和GPU中的模型,是兩個不同的對象,構建完優化器再將模型放入GPU,將導致優化器隻優化CPU中的模型參數。
有些電腦有多張顯卡,那麼.to(‘cuda’)默認是將張量或者模型轉移到第一張顯卡(編號為0)上,如果想轉移到其他顯卡上,則用下面的程序
device = torch.device(‘cuda:2') # 2是設備號,假如有八張顯卡,那麼編號就是0—7
torch.save
至此,所有程序已經完成
總結
上面的程序有點亂,我這裡綜合一下:
# coding=utf-8
import torch
import torch.nn as nn
from torchvision import datasets
from torch.utils.data import DataLoader
from torchvision.transforms import ToTensor
import matplotlib.pyplot as plt
import os
os.environ['KMP_DUPLICATE_LIB_OK'] = 'TRUE' # 沒有這句會報錯,具體原因我也不知道
# 導入數據
training_data = datasets.FashionMNIST(
root="../data",
train=True,
download=True,
transform=ToTensor()
)
test_data = datasets.FashionMNIST(
root="../data",
train=False,
download=True,
transform=ToTensor()
)
# 定義超參數
# 之所以在這個地方定義,是因為在初始化DataLoader時需要用到batch_size
learning_rate = 1e-3
batch_size = 64
epochs = 5
train_dataloader = DataLoader(training_data, batch_size=batch_size, shuffle=True)
# train_dataloader是一個DataLoader類的對象
test_dataloader = DataLoader(test_data, batch_size=batch_size, shuffle=True)
# 搭建神經網絡
class NeuralNetwork(nn.Module):
def __init__(self):
super(NeuralNetwork, self).__init__()
self.flatten = nn.Flatten() # 打平
self.linear_relu_stack = nn.Sequential(
nn.Linear(28*28, 512), # 線性層
nn.ReLU(), # 激活層
nn.Linear(512, 512),
nn.ReLU(),
nn.Linear(512, 10),
nn.ReLU()
)
def forward(self, x):
x = self.flatten(x) # 打平層
logits = self.linear_relu_stack(x) # 線性激活層
return logits
# 確定使用設備
device = 'cuda' if torch.cuda.is_available() else 'cpu'
# 實例化一個神經網絡類
model = NeuralNetwork().to(device)
# 確定損失函數
loss_fn = nn.CrossEntropyLoss()
# 確定優化器
optimizer = torch.optim.SGD(model.parameters(), lr=learning_rate)
# 封裝訓練過程
def train_loop(dataloader, model, loss_fn, optimizer):
size = len(dataloader.dataset)
for batch, (X, y) in enumerate(dataloader):
X, y = X.to(device), y.to(device) # 將樣本和標簽轉移到device中
# Compute prediction and loss,下面兩步相當於繪制計算圖
pred = model(X)
loss = loss_fn(pred, y)
# Backpropagation
optimizer.zero_grad() # 梯度信息清零
loss.backward() # 反向傳播
optimizer.step() # 一旦有瞭梯度,就可以更新參數
if batch % 100 == 0:
loss, current = loss.item(), batch * len(X)
print(f"loss: {loss:>7f} [{current:>5d}/{size:>5d}]")
# 封裝測試過程
def test_loop(dataloader, model, loss_fn):
size = len(dataloader.dataset)
num_batches = len(dataloader)
test_loss, correct = 0, 0
with torch.no_grad():
for X, y in dataloader:
X, y = X.to(device), y.to(device) # 將樣本和標簽轉移到device中
pred = model(X)
test_loss += loss_fn(pred, y).item()
correct += (pred.argmax(1) == y).type(torch.float).sum().item()
test_loss /= num_batches
correct /= size
print(f"Test Error: \n Accuracy: {(100*correct):>0.1f}%, Avg loss: {test_loss:>8f} \n")
# 訓練
for t in range(epochs):
print(f"Epoch {t+1}\n-------------------------------")
train_loop(train_dataloader, model, loss_fn, optimizer)
test_loop(test_dataloader, model, loss_fn)
print("Done!")
# 保存模型參數
torch.save(model.state_dict(), './model_weights.pth')
# 保存模型結構
torch.save(model, './model.pth')
# 導入模型結構
model_loaded = torch.load('./model.pth') # 模型自動導入到GPU當中
# 導入模型參數
model_loaded.load_state_dict(torch.load('model_weights.pth'))
# 用導入的模型測試
test_features, test_labels = next(iter(test_dataloader))
test_features = test_features.to(device)
logits = model_loaded(test_features[0]) # 使用導入的模型
pred_probab = nn.Softmax(dim=1)(logits)
pred = pred_probab.argmax(1)
# 可視化
img = test_features[0].squeeze() # 將長度為1的維度去掉
img = img.to('cpu') # 繪圖時,需要將張量轉回到CPU當中
true_label = test_labels[0] # 標簽是否轉移到CPU無所謂,因為沒有用於plt的方法中
plt.imshow(img, cmap="gray")
plt.show()
print(f"True label: {true_label}")
print(f"Predict: {pred.item()}")
到此這篇關於pytorch 搭建神經網路的實現的文章就介紹到這瞭,更多相關pytorch 神經網路內容請搜索WalkonNet以前的文章或繼續瀏覽下面的相關文章希望大傢以後多多支持WalkonNet!
推薦閱讀:
- 手把手教你實現PyTorch的MNIST數據集
- pytorch實現加載保存查看checkpoint文件
- PyTorch實現MNIST數據集手寫數字識別詳情
- pytorch實現手寫數字圖片識別
- Pytorch實現全連接層的操作