openCV實現圖像分割
本次實驗為大傢分享瞭openCV實現圖像分割的具體實現代碼,供大傢參考,具體內容如下
一.實驗目的
進一步理解圖像的閾值分割方法和邊緣檢測方法的原理。
掌握圖像基本全局閾值方法和最大類間方差法(otsu法)的原理並編程實現。
編程實現圖像的邊緣檢測。
二.實驗內容和要求
編程實現圖像閾值分割(基本全局閾值方法和otsu法)和邊緣檢測。
三.實驗主要儀器設備和材料
計算機,VS2017+OpenCV
四.實驗原理與方法
圖像的閾值分割的基本原理
圖像的二值化處理圖像分割中的一個主要內容,就是將圖像上的點的灰度置為0或255,也就是講整個圖像呈現出明顯的黑白效果。用I表示原圖,R表示二值化後的圖,則二值化的過程可以用以下公式表示:

thr表示選取的閾值。二值化的過程就是當原圖的像素灰度值大於閾值就將其變白,否則就將其變黑。即將256個亮度等級的灰度圖像通過適當的閥值選取而將圖像變為二個級別灰度級,這樣隻有二個灰度級的圖像在圖像處理分析過程中占有非常重要的地位,特別是在實用的圖像處理中。
根據對全圖使用統一閾值還是對不同區域使用不同閾值,可以分為全局閾值方法(global thresholding)和局部閾值方法(local thresholding,也叫做自適應閾值方法adaptive thresholding);這種與坐標相關的閾值也叫動態閾值,具體的方法,可以參考相關的圖像處理書籍。
1、基本全局閾值方法,即在整個圖像中所有的象素點,其閾值thr相同,具體步驟為:
(1)選取一個初始估計值T;
(2)用T分割圖像。這樣便會生成兩組像素集合:G1由所有灰度值大於T的像素組成,而G2由所有灰度值小於或等於T的像素組成。
(3)對G1和G2中所有像素計算平均灰度值u1和u2。
(4)計算新的閾值:T=(u1 + u2)/2。
(5)重復步驟(2)到(4),直到得到的T值之差小於一個事先定義的參數T0。
2、Otsu方法的算法步驟為:
(1)先計算圖像的歸一化直方圖;
(2)i表示分類的閾值,也即一個灰度級,從0開始迭代;
(3)通過歸一化的直方圖,統計0~i 灰度級的像素(背景像素) 所占整幅圖像的比例w0,並統計背景像素的平均灰度u0;統計i~255灰度級的像素(前景像素) 所占整幅圖像的比例w1,並統計前景像素的平均灰度u1;
(4)計算前景像素和背景像素的方差 g = w0w1(u0-u1) (u0-u1)
(5)i++,直到i為256時結束迭代;
(6)將最大g相應的i值作為圖像的全局閾值。
邊緣檢測
圖像中邊緣的檢測可以借助一階和二階微分實現,常見的一階邊緣檢測算子包括Roberts算子、Prewitt算子和Sobel算子,二階算子主要是Laplacian算子,由於受噪聲影響比較大,往往在使用之前先對圖像進行平滑處理,LOG算子就是先對圖像進行高斯平滑,然後進行拉普拉斯變換並求零交叉點。Canny算子是最優的邊緣檢測算子。
五.實驗內容
1、圖像的閾值分割:
圖像為車牌圖像,編寫代碼實現基本全局閾值法和Otsu法,比較分割結果。

2、邊緣檢測
用邊緣檢測算子對車牌圖像進行處理,可以用梯度算子、Laplacian算子或Canny算子(Canny算子可以直接用OpenCV函數)。比較先閾值分割後邊緣檢測和直接對圖像進行邊緣檢測這兩種情況的結果是否有差別。
註意:這裡提取灰度邊緣即可。

代碼:
#include "pch.h"
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
// 拉普拉斯銳化函數
void LaplacianSharpDeal(const Mat &src, Mat &dst) {
if (!src.data)return;
for (int i = 0; i < src.rows; ++i)
for (int j = 0; j < src.cols; ++j) {
float a;
if (i > 1 && i < src.rows - 1 && j > 1 && j < src.cols - 1) {
a = 5 * (float)src.at<uchar>(i, j) - (float)src.at<uchar>(i - 1, j) - (float)src.at<uchar>(i, j - 1) -
(float)src.at<uchar>(i, j + 1) - (float)src.at<uchar>(i + 1, j);
}
else {//邊緣賦值
a = src.at<uchar>(i, j);
}
if (a > 255 || a < 0) {
dst.at<uchar>(i, j) = src.at<uchar>(i, j);
}
else {
dst.at<uchar>(i, j) = a;
}
}
}
// 基本全局閾值方法函數
int BasicGlobalThreshold(Mat src, float oldValue)
{
int cols = src.cols;
int rows = src.rows;
float G1 = 0;
float G2 = 0;
float g1 = 0;
float g2 = 0;
float u1 = 0;
float u2 = 0;
float T0 = 0;
// 計算灰度直方圖分佈,統計像素數和頻率
for (int i = 0; i < rows; i++)
{
for (int j = 0; j < cols; j++)
{
if (src.at<uchar>(i, j) > oldValue)
{
G1 += src.at<uchar>(i, j);
g1 += 1;
}
else
{
G2 += src.at<uchar>(i, j);
g2 += 1;
}
}
}
u1 = G1 / g1;
u2 = G2 / g2;
T0 = (u1 + u2) / 2;
std::cout << T0 << std::endl;
if (abs(oldValue - T0) < 0.1) {
return T0;
}
else
{
BasicGlobalThreshold(src, T0);
}
}
// Otsu方法函數
int Otsu(Mat src)
{
int cols = src.cols;
int rows = src.rows;
int nPixelNum = cols * rows;
// 初始化
int pixelNum[256];
double probability[256];
for (int i = 0; i < 256; i++)
{
pixelNum[i] = 0;
probability[i] = 0.0;
}
// 統計像素數和頻率
for (int i = 0; i < rows; i++)
{
for (int j = 0; j < cols; j++)
{
pixelNum[src.at<uchar>(i, j)]++;
}
}
for (int i = 0; i < 256; i++)
{
probability[i] = (double)0.1*pixelNum[i] / nPixelNum;
}
// 計算
int Threshold = 0; // 最佳閾值
double MaxDelta = 0.0; // 最大類間方差
double Mean_0 = 0.0; // 左邊平均值
double Mean_1 = 0.0; // 右邊平均值
double Delta = 0.0; // 類間方差
double Mean_0_temp = 0.0; // 左邊平均值中間值
double Mean_1_temp = 0.0; // 右邊平均值中間值
double Probability_0 = 0.0; // 左邊頻率值
double Probability_1 = 0.0; // 右邊頻率值
for (int j = 0; j < 256; j++)
{
for (int i = 0; i < 256; i++)
{
if (i < j)// 前半部分
{
Probability_0 += probability[i];
Mean_0_temp += i * probability[i];
}
else // 後半部分
{
Probability_1 += probability[i];
Mean_1_temp += i * probability[i];
}
}
// 計算平均值
// Mean_0_teamp計算的是前半部分的灰度值的總和除以總像素數,
// 所以要除以前半部分的頻率才是前半部分的平均值,後半部分同樣
Mean_0 = Mean_0_temp / Probability_0;
Mean_1 = Mean_1_temp / Probability_1;
Delta = (double)(Probability_0 * Probability_1 * pow((Mean_0 - Mean_1), 2));
if (Delta > MaxDelta)
{
MaxDelta = Delta;
Threshold = j;
}
// 相關參數歸零
Probability_0 = 0.0;
Probability_1 = 0.0;
Mean_0_temp = 0.0;
Mean_1_temp = 0.0;
Mean_0 = 0.0;
Mean_1 = 0.0;
Delta = 0.0;
}
return Threshold;
}
void main() {
Mat image = imread("A1.bmp", 0);
Mat image1,image2;
Mat image3(image.size(), image.type());
Mat image4(image.size(), image.type());
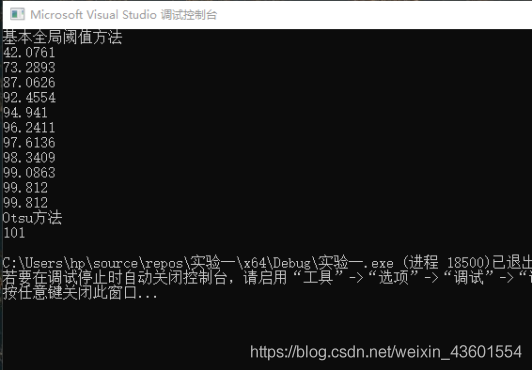
std::cout << "基本全局閾值方法" << std::endl;
int OstuThreshold1 = BasicGlobalThreshold(image, 0.01);
int OstuThreshold2 = Otsu(image);
std::cout << "Otsu方法" << std::endl;
std::cout << OstuThreshold2 << std::endl;
threshold(image, image1, OstuThreshold1, 255, CV_THRESH_OTSU);
threshold(image, image2, OstuThreshold2, 255, CV_THRESH_OTSU);
LaplacianSharpDeal(image2, image3);
LaplacianSharpDeal(image, image4);
imshow("基本全局閾值方法", image1);
imshow("Otsu方法", image2);
imshow("先閾值分割後邊緣檢測", image3);
imshow("直接對圖像進行邊緣檢測", image4);
waitKey();
}
以上就是本文的全部內容,希望對大傢的學習有所幫助,也希望大傢多多支持WalkonNet。
推薦閱讀:
- C++ Opencv自寫函數實現膨脹腐蝕處理技巧
- C++ OpenCV實現圖像雙三次插值算法詳解
- C語言 OpenCV實現柱面投影
- C++ opencv圖像處理實現灰度變換示例
- opencv實現機器視覺檢測和計數的方法