Python深度學習之Unet 語義分割模型(Keras)
前言
最近由於在尋找方向上迷失自我,準備瞭解更多的計算機視覺任務重的模型。看到語義分割任務重Unet一個有意思的模型,我準備來復現一下它。
一、什麼是語義分割
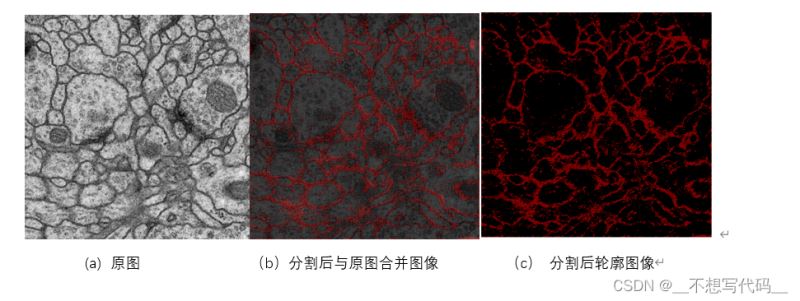
語義分割任務,如下圖所示:

簡而言之,語義分割任務就是將圖片中的不同類別,用不同的顏色標記出來,每一個類別使用一種顏色。常用於醫學圖像,衛星圖像任務。
那如何做到將像素點上色呢?
其實語義分割的輸出和圖像分類網絡類似,圖像分類類別數是一個一維的one hot 矩陣。例如:三分類的[0,1,0]。
語義分割任務最後的輸出特征圖 是一個三維結構,大小與原圖類似,通道數就是類別數。 如下圖(圖片來源於知乎)所示:

其中通道數是類別數,每個通道所標記的像素點,是該類別在圖像中的位置,最後通過argmax 取每個通道有用像素 合成一張圖像,用不同顏色表示其類別位置。 語義分割任務其實也是分類任務中的一種,他不過是對每一個像素點進行細分,找到每一個像素點所述的類別。 這就是語義分割任務啦~
下面我們來復現 unet 模型
二、Unet
1.基本原理
什麼是Unet,它的網絡結構如下圖所示:
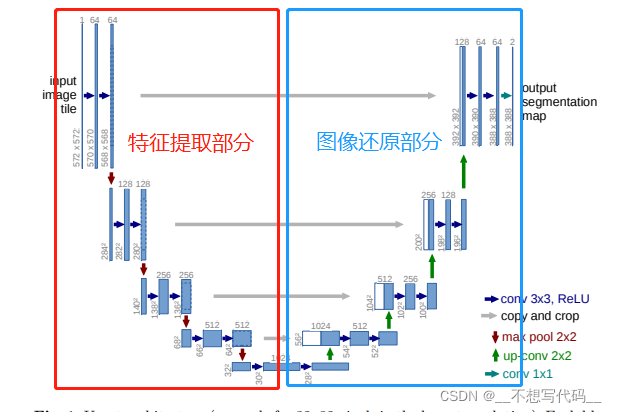
整個網絡是一個“U” 的形狀,Unet 網絡可以分成兩部分,上圖紅色方框中是特征提取部分,和其他卷積神經網絡一樣,都是通過堆疊卷積提取圖像特征,通過池化來壓縮特征圖。藍色方框中為圖像還原部分(這樣稱它可能不太專業,大傢理解就好),通過上采樣和卷積來來將壓縮的圖像進行還原。特征提取部分可以使用優秀的網絡,例如:Resnet50,VGG等。
註意:由於 Resnet50和VGG 網絡太大。本文將使用Mobilenet 作為主幹特征提取網絡。為瞭方便理解Unet,本文將使用自己搭建的一個mini_unet 去幫祝大傢理解。為瞭方便計算,復現過程會把壓縮後的特征圖上采樣和輸入的特征圖一樣大小。
代碼github地址: 一直上不去
先上傳到碼雲: https://gitee.com/Boss-Jian/unet
2.mini_unet
mini_unet 是搭建來幫助大傢理解語義分割的網絡流程,並不能作為一個優秀的模型完成語義分割任務,來看一下代碼的實現:
from keras.layers import Input,Conv2D,Dropout,MaxPooling2D,Concatenate,UpSampling2D
from numpy import pad
from keras.models import Model
def unet_mini(n_classes=21,input_shape=(224,224,3)):
img_input = Input(shape=input_shape)
#------------------------------------------------------
# #encoder 部分
#224,224,3 - > 112,112,32
conv1 = Conv2D(32,(3,3),activation='relu',padding='same')(img_input)
conv1 = Dropout(0.2)(conv1)
conv1 = Conv2D(32,(3,3),activation='relu',padding='same')(conv1)
pool1 = MaxPooling2D((2,2),strides=2)(conv1)
#112,112,32 -> 56,56,64
conv2 = Conv2D(64,(3,3),activation='relu',padding='same')(pool1)
conv2 = Dropout(0.2)(conv2)
conv2 = Conv2D(64,(3,3),activation='relu',padding='same')(conv2)
pool2 = MaxPooling2D((2,2),strides=2)(conv2)
#56,56,64 -> 56,56,128
conv3 = Conv2D(128,(3,3),activation='relu',padding='same')(pool2)
conv3 = Dropout(0.2)(conv3)
conv3 = Conv2D(128,(3,3),activation='relu',padding='same')(conv3)
#-------------------------------------------------
# decoder 部分
#56,56,128 -> 112,112,64
up1 = UpSampling2D(2)(conv3)
#112,112,64 -> 112,112,64+128
up1 = Concatenate(axis=-1)([up1,conv2])
# #112,112,192 -> 112,112,64
conv4 = Conv2D(64,(3,3),activation='relu',padding='same')(up1)
conv4 = Dropout(0.2)(conv4)
conv4 = Conv2D(64,(3,3),activation='relu',padding='same')(conv4)
#112,112,64 - >224,224,64
up2 = UpSampling2D(2)(conv4)
#224,224,64 -> 224,224,64+32
up2 = Concatenate(axis=-1)([up2,conv1])
# 224,224,96 -> 224,224,32
conv5 = Conv2D(32,(3,3),activation='relu',padding='same')(up2)
conv5 = Dropout(0.2)(conv5)
conv5 = Conv2D(32,(3,3),activation='relu',padding='same')(conv5)
o = Conv2D(n_classes,1,padding='same')(conv5)
return Model(img_input,o,name="unet_mini")
if __name__=="__main__":
model = unet_mini()
model.summary()
mini_unet 通過encoder 部分將 224x224x3的圖像 變成 112x112x64 的特征圖,再通過 上采樣方法將特征圖放大到 224x224x32。最後通過卷積:
o = Conv2D(n_classes,1,padding='same')(conv5)
將特征圖的通道數調節成和類別數一樣。
3. Mobilenet_unet
Mobilenet_unet 是使用Mobinet 作為主幹特征提取網絡,並且加載預訓練權重來提升特征提取的能力。decoder 的還原部分和上面一致,下面是Mobilenet_unet 的網絡結構:
from keras.models import *
from keras.layers import *
import keras.backend as K
import keras
from tensorflow.python.keras.backend import shape
IMAGE_ORDERING = "channels_last"# channel last
def relu6(x):
return K.relu(x, max_value=6)
def _conv_block(inputs, filters, alpha, kernel=(3, 3), strides=(1, 1)):
channel_axis = 1 if IMAGE_ORDERING == 'channels_first' else -1
filters = int(filters * alpha)
x = ZeroPadding2D(padding=(1, 1), name='conv1_pad',
data_format=IMAGE_ORDERING)(inputs)
x = Conv2D(filters, kernel, data_format=IMAGE_ORDERING,
padding='valid',
use_bias=False,
strides=strides,
name='conv1')(x)
x = BatchNormalization(axis=channel_axis, name='conv1_bn')(x)
return Activation(relu6, name='conv1_relu')(x)
def _depthwise_conv_block(inputs, pointwise_conv_filters, alpha,
depth_multiplier=1, strides=(1, 1), block_id=1):
channel_axis = 1 if IMAGE_ORDERING == 'channels_first' else -1
pointwise_conv_filters = int(pointwise_conv_filters * alpha)
x = ZeroPadding2D((1, 1), data_format=IMAGE_ORDERING,
name='conv_pad_%d' % block_id)(inputs)
x = DepthwiseConv2D((3, 3), data_format=IMAGE_ORDERING,
padding='valid',
depth_multiplier=depth_multiplier,
strides=strides,
use_bias=False,
name='conv_dw_%d' % block_id)(x)
x = BatchNormalization(
axis=channel_axis, name='conv_dw_%d_bn' % block_id)(x)
x = Activation(relu6, name='conv_dw_%d_relu' % block_id)(x)
x = Conv2D(pointwise_conv_filters, (1, 1), data_format=IMAGE_ORDERING,
padding='same',
use_bias=False,
strides=(1, 1),
name='conv_pw_%d' % block_id)(x)
x = BatchNormalization(axis=channel_axis,
name='conv_pw_%d_bn' % block_id)(x)
return Activation(relu6, name='conv_pw_%d_relu' % block_id)(x)
def get_mobilnet_eocoder(input_shape=(224,224,3),weights_path=""):
# 必須是32 的倍數
assert input_shape[0] % 32 == 0
assert input_shape[1] % 32 == 0
alpha = 1.0
depth_multiplier = 1
img_input = Input(shape=input_shape)
#(None, 224, 224, 3) ->(None, 112, 112, 64)
x = _conv_block(img_input, 32, alpha, strides=(2, 2))
x = _depthwise_conv_block(x, 64, alpha, depth_multiplier, block_id=1)
f1 = x
#(None, 112, 112, 64) -> (None, 56, 56, 128)
x = _depthwise_conv_block(x, 128, alpha, depth_multiplier,
strides=(2, 2), block_id=2)
x = _depthwise_conv_block(x, 128, alpha, depth_multiplier, block_id=3)
f2 = x
#(None, 56, 56, 128) -> (None, 28, 28, 256)
x = _depthwise_conv_block(x, 256, alpha, depth_multiplier,
strides=(2, 2), block_id=4)
x = _depthwise_conv_block(x, 256, alpha, depth_multiplier, block_id=5)
f3 = x
# (None, 28, 28, 256) -> (None, 14, 14, 512)
x = _depthwise_conv_block(x, 512, alpha, depth_multiplier,
strides=(2, 2), block_id=6)
x = _depthwise_conv_block(x, 512, alpha, depth_multiplier, block_id=7)
x = _depthwise_conv_block(x, 512, alpha, depth_multiplier, block_id=8)
x = _depthwise_conv_block(x, 512, alpha, depth_multiplier, block_id=9)
x = _depthwise_conv_block(x, 512, alpha, depth_multiplier, block_id=10)
x = _depthwise_conv_block(x, 512, alpha, depth_multiplier, block_id=11)
f4 = x
# (None, 14, 14, 512) -> (None, 7, 7, 1024)
x = _depthwise_conv_block(x, 1024, alpha, depth_multiplier,
strides=(2, 2), block_id=12)
x = _depthwise_conv_block(x, 1024, alpha, depth_multiplier, block_id=13)
f5 = x
# 加載預訓練模型
if weights_path!="":
Model(img_input, x).load_weights(weights_path, by_name=True, skip_mismatch=True)
# f1: (None, 112, 112, 64)
# f2: (None, 56, 56, 128)
# f3: (None, 28, 28, 256)
# f4: (None, 14, 14, 512)
# f5: (None, 7, 7, 1024)
return img_input, [f1, f2, f3, f4, f5]
def mobilenet_unet(num_classes=2,input_shape=(224,224,3)):
#encoder
img_input,levels = get_mobilnet_eocoder(input_shape=input_shape,weights_path="model_data\mobilenet_1_0_224_tf_no_top.h5")
[f1, f2, f3, f4, f5] = levels
# f1: (None, 112, 112, 64)
# f2: (None, 56, 56, 128)
# f3: (None, 28, 28, 256)
# f4: (None, 14, 14, 512)
# f5: (None, 7, 7, 1024)
#decoder
#(None, 14, 14, 512) - > (None, 14, 14, 512)
o = f4
o = ZeroPadding2D()(o)
o = Conv2D(512, (3, 3), padding='valid' , activation='relu' , data_format=IMAGE_ORDERING)(o)
o = BatchNormalization()(o)
#(None, 14, 14, 512) ->(None,28,28,256)
o = UpSampling2D(2)(o)
o = Concatenate(axis=-1)([o,f3])
o = ZeroPadding2D()(o)
o = Conv2D(256, (3, 3), padding='valid' , activation='relu' , data_format=IMAGE_ORDERING)(o)
o = BatchNormalization()(o)
# None,28,28,256)->(None,56,56,128)
o = UpSampling2D(2)(o)
o = Concatenate(axis=-1)([o,f2])
o = ZeroPadding2D()(o)
o = Conv2D(128, (3, 3), padding='valid' , activation='relu' , data_format=IMAGE_ORDERING)(o)
o = BatchNormalization()(o)
#(None,56,56,128) ->(None,112,112,64)
o = UpSampling2D(2)(o)
o = Concatenate(axis=-1)([o,f1])
o = ZeroPadding2D()(o)
o = Conv2D(128, (3, 3), padding='valid' , activation='relu' , data_format=IMAGE_ORDERING)(o)
o = BatchNormalization()(o)
#(None,112,112,64) -> (None,112,112,num_classes)
# 再上采樣 讓輸入和出處圖片大小一致
o = UpSampling2D(2)(o)
o = ZeroPadding2D()(o)
o = Conv2D(64, (3, 3), padding='valid' , activation='relu' , data_format=IMAGE_ORDERING)(o)
o = BatchNormalization()(o)
o = Conv2D(num_classes, (3, 3), padding='same',
data_format=IMAGE_ORDERING)(o)
return Model(img_input,o)
if __name__=="__main__":
mobilenet_unet(input_shape=(512,512,3)).summary()
特征圖的大小變化,以及代碼含義都已經註釋在代碼裡瞭。大傢仔細閱讀吧
4.數據加載部分
import math
import os
from random import shuffle
import cv2
import keras
import numpy as np
from PIL import Image
#-------------------------------
# 將圖片轉換為 rgb
#------------------------------
def cvtColor(image):
if len(np.shape(image)) == 3 and np.shape(image)[2] == 3:
return image
else:
image = image.convert('RGB')
return image
#-------------------------------
# 圖片歸一化 0~1
#------------------------------
def preprocess_input(image):
image = image / 127.5 - 1
return image
#---------------------------------------------------
# 對輸入圖像進行resize
#---------------------------------------------------
def resize_image(image, size):
iw, ih = image.size
w, h = size
scale = min(w/iw, h/ih)
nw = int(iw*scale)
nh = int(ih*scale)
image = image.resize((nw,nh), Image.BICUBIC)
new_image = Image.new('RGB', size, (128,128,128))
new_image.paste(image, ((w-nw)//2, (h-nh)//2))
return new_image, nw, nh
class UnetDataset(keras.utils.Sequence):
def __init__(self, annotation_lines, input_shape, batch_size, num_classes, train, dataset_path):
self.annotation_lines = annotation_lines
self.length = len(self.annotation_lines)
self.input_shape = input_shape
self.batch_size = batch_size
self.num_classes = num_classes
self.train = train
self.dataset_path = dataset_path
def __len__(self):
return math.ceil(len(self.annotation_lines) / float(self.batch_size))
def __getitem__(self, index):
#圖片和標簽、
images = []
targets = []
# 讀取一個batchsize
for i in range(index*self.batch_size,(index+1)*self.batch_size):
#判斷 i 越界情況
i = i%self.length
name = self.annotation_lines[i].split()[0]
# 從路徑中讀取圖像 jpg 表示圖片,png 表示標簽
jpg = Image.open(os.path.join(os.path.join(self.dataset_path,'Images'),name+'.png'))
png = Image.open(os.path.join(os.path.join(self.dataset_path,'Labels'),name+'.png'))
#-------------------
# 數據增強 和 歸一化
#-------------------
jpg,png = self.get_random_data(jpg,png,self.input_shape,random=self.train)
jpg = preprocess_input(np.array(jpg,np.float64))
png = np.array(png)
#-----------------------------------
# 醫學圖像中 描繪出的是細胞邊緣
# 將小於 127.5的像素點 作為目標 像素點
#------------------------------------
seg_labels = np.zeros_like(png)
seg_labels[png<=127.5] = 1
#--------------------------------
# 轉化為 one hot 標簽
# -------------------------
seg_labels = np.eye(self.num_classes + 1)[seg_labels.reshape([-1])]
seg_labels = seg_labels.reshape((int(self.input_shape[0]), int(self.input_shape[1]), self.num_classes + 1))
images.append(jpg)
targets.append(seg_labels)
images = np.array(images)
targets = np.array(targets)
return images, targets
def rand(self, a=0, b=1):
return np.random.rand() * (b - a) + a
def get_random_data(self, image, label, input_shape, jitter=.3, hue=.1, sat=1.5, val=1.5, random=True):
image = cvtColor(image)
label = Image.fromarray(np.array(label))
h, w = input_shape
if not random:
iw, ih = image.size
scale = min(w/iw, h/ih)
nw = int(iw*scale)
nh = int(ih*scale)
image = image.resize((nw,nh), Image.BICUBIC)
new_image = Image.new('RGB', [w, h], (128,128,128))
new_image.paste(image, ((w-nw)//2, (h-nh)//2))
label = label.resize((nw,nh), Image.NEAREST)
new_label = Image.new('L', [w, h], (0))
new_label.paste(label, ((w-nw)//2, (h-nh)//2))
return new_image, new_label
# resize image
rand_jit1 = self.rand(1-jitter,1+jitter)
rand_jit2 = self.rand(1-jitter,1+jitter)
new_ar = w/h * rand_jit1/rand_jit2
scale = self.rand(0.25, 2)
if new_ar < 1:
nh = int(scale*h)
nw = int(nh*new_ar)
else:
nw = int(scale*w)
nh = int(nw/new_ar)
image = image.resize((nw,nh), Image.BICUBIC)
label = label.resize((nw,nh), Image.NEAREST)
flip = self.rand()<.5
if flip:
image = image.transpose(Image.FLIP_LEFT_RIGHT)
label = label.transpose(Image.FLIP_LEFT_RIGHT)
# place image
dx = int(self.rand(0, w-nw))
dy = int(self.rand(0, h-nh))
new_image = Image.new('RGB', (w,h), (128,128,128))
new_label = Image.new('L', (w,h), (0))
new_image.paste(image, (dx, dy))
new_label.paste(label, (dx, dy))
image = new_image
label = new_label
# distort image
hue = self.rand(-hue, hue)
sat = self.rand(1, sat) if self.rand()<.5 else 1/self.rand(1, sat)
val = self.rand(1, val) if self.rand()<.5 else 1/self.rand(1, val)
x = cv2.cvtColor(np.array(image,np.float32)/255, cv2.COLOR_RGB2HSV)
x[..., 0] += hue*360
x[..., 0][x[..., 0]>1] -= 1
x[..., 0][x[..., 0]<0] += 1
x[..., 1] *= sat
x[..., 2] *= val
x[x[:,:, 0]>360, 0] = 360
x[:, :, 1:][x[:, :, 1:]>1] = 1
x[x<0] = 0
image_data = cv2.cvtColor(x, cv2.COLOR_HSV2RGB)*255
return image_data,label
def on_epoch_begin(self):
shuffle(self.annotation_lines)
訓練過程代碼:
import numpy as np
from tensorflow.python.keras.callbacks import EarlyStopping, ModelCheckpoint, TensorBoard
from keras.optimizers import Adam
import os
from unet_mini import unet_mini
from mobilnet_unet import mobilenet_unet
from callbacks import ExponentDecayScheduler,LossHistory
from keras import backend as K
from keras import backend
from data_loader import UnetDataset
#--------------------------------------
# 交叉熵損失函數 cls_weights 類別的權重
#-------------------------------------
def CE(cls_weights):
cls_weights = np.reshape(cls_weights, [1, 1, 1, -1])
def _CE(y_true, y_pred):
y_pred = K.clip(y_pred, K.epsilon(), 1.0 - K.epsilon())
CE_loss = - y_true[...,:-1] * K.log(y_pred) * cls_weights
CE_loss = K.mean(K.sum(CE_loss, axis = -1))
# dice_loss = tf.Print(CE_loss, [CE_loss])
return CE_loss
return _CE
def f_score(beta=1, smooth = 1e-5, threhold = 0.5):
def _f_score(y_true, y_pred):
y_pred = backend.greater(y_pred, threhold)
y_pred = backend.cast(y_pred, backend.floatx())
tp = backend.sum(y_true[...,:-1] * y_pred, axis=[0,1,2])
fp = backend.sum(y_pred , axis=[0,1,2]) - tp
fn = backend.sum(y_true[...,:-1], axis=[0,1,2]) - tp
score = ((1 + beta ** 2) * tp + smooth) \
/ ((1 + beta ** 2) * tp + beta ** 2 * fn + fp + smooth)
return score
return _f_score
def train():
#-------------------------
# 細胞圖像 分為細胞壁 和其他
# 初始化 參數
#-------------------------
num_classes = 2
input_shape = (512,512,3)
# 從第幾個epoch 繼續訓練
batch_size = 4
learn_rate = 1e-4
start_epoch = 0
end_epoch = 100
num_workers = 4
dataset_path = 'Medical_Datasets'
model = mobilenet_unet(num_classes,input_shape=input_shape)
model.summary()
# 讀取數據圖片的路勁
with open(os.path.join(dataset_path, "ImageSets/Segmentation/train.txt"),"r") as f:
train_lines = f.readlines()
logging = TensorBoard(log_dir = 'logs/')
checkpoint = ModelCheckpoint('logs/ep{epoch:03d}-loss{loss:.3f}.h5',
monitor = 'loss', save_weights_only = True, save_best_only = False, period = 1)
reduce_lr = ExponentDecayScheduler(decay_rate = 0.96, verbose = 1)
early_stopping = EarlyStopping(monitor='loss', min_delta=0, patience=10, verbose=1)
loss_history = LossHistory('logs/', val_loss_flag = False)
epoch_step = len(train_lines) // batch_size
cls_weights = np.ones([num_classes], np.float32)
loss = CE(cls_weights)
model.compile(loss = loss,
optimizer = Adam(lr=learn_rate),
metrics = [f_score()])
train_dataloader = UnetDataset(train_lines, input_shape[:2], batch_size, num_classes, True, dataset_path)
print('Train on {} samples, with batch size {}.'.format(len(train_lines), batch_size))
model.fit_generator(
generator = train_dataloader,
steps_per_epoch = epoch_step,
epochs = end_epoch,
initial_epoch = start_epoch,
# use_multiprocessing = True if num_workers > 1 else False,
workers = num_workers,
callbacks = [logging, checkpoint, early_stopping,reduce_lr,loss_history]
)
if __name__=="__main__":
train()
最後的預測結果:
完整的代大傢感興趣可以去github下載下來再看,代碼比較多,全部貼出來博客顯得太長瞭。
這就是簡單的語義分割任務啦。
參考
https://github.com/bubbliiiing/unet-keras
https://github.com/divamgupta/image-segmentation-keras
以上就是Python深度學習之Unet 語義分割模型(Keras)的詳細內容,更多關於Python Unet 語義分割模型的資料請關註WalkonNet其它相關文章!
推薦閱讀:
- 關於keras中卷積層Conv2D的學習記錄
- Pytorch深度學習之實現病蟲害圖像分類
- tensorflow2.0實現復雜神經網絡(多輸入多輸出nn,Resnet)
- Python深度學習之實現卷積神經網絡
- 圖片去摩爾紋簡述實現python代碼示例