python實現高斯模糊及原理詳解
高斯模糊是一種常見的模糊技術,相關知識點有:高斯函數、二維卷積。

(一)一維高斯分佈函數
一維(連續變量)高斯函數形式如下,高斯函數又稱“正態分佈函數”:

μ是分佈函數的均值(或者期望),sigma是標準差。
一維高斯分佈函數的圖形:

從圖可知,以x=0為中心,x取值距離中心越近,概率密度函數值越大,距離中心越遠,密度函數值越小。
(二)二維高斯分佈函數
二維高斯分佈函數的形式:

特別說明,當變量x和y相互獨立時,則相關系數ρ=0,二維高斯分佈函數可以簡化為:

二維高斯分佈函數的圖形:

對於一維高斯分佈,函數中心是平面上的一個點;而對於二維高斯分佈,函數中心是一個三維立體空間上的一個點,即上圖中山峰的最頂端處的點。
(三)高斯模糊
高斯模糊本質上一種數據平滑技術,可以用於一維、二維甚至多維空間。數據經高斯模糊處理之後,數據會趨向於周邊鄰近的其他數據,導致各個數據“趨同”。
在圖像領域,各個位置的像素值使用“周邊鄰居像素點加權平均”重新賦值。對於每個像素點,由於計算時均以當前像素點為中心,所以均值μ=0。使用時有2個超參數需要設置:高斯核大小和高斯函數標準差σ。高斯核大小表示“影響當前點的最大鄰域范圍”,而標準差表示“鄰域中的其他像素點對當前點的影響力”。
從下而上觀察下圖各個函數圖像,各個函數的均值相同,而方差逐步減小。

方差衡量數據的分散程度,方差越大,數據越分散,圖形就越扁平,數據的集中趨勢越弱,應用到高斯模糊中方差越大圖形越模糊。
高斯模糊涉及到2個關鍵技術點:
(1)如何計算高斯卷積核
3×3大小的高斯卷積核的計算示意圖

直接計算二維高斯函數值後,卷積核的各個位置取值(截圖自pycharm的debug):
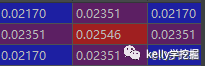
卷積核歸一化後的各個位置取值(截圖自pycharm的debug):

高斯卷積核的python代碼:
def gaussian_kernel(self): kernel = np.zeros(shape=(self.kernel_size, self.kernel_size), dtype=np.float) radius = self.kernel_size//2 for y in range(-radius, radius + 1): # [-r, r] for x in range(-radius, radius + 1): # 二維高斯函數 v = 1.0 / (2 * np.pi * self.sigma ** 2) * np.exp(-1.0 / (2 * self.sigma ** 2) * (x ** 2 + y ** 2)) kernel[y + radius, x + radius] = v # 高斯函數的x和y值 vs 高斯核的下標值 kernel2 = kernel / np.sum(kernel) return kernel2
(2)如何在二維圖像上進行卷積
對於二維矩陣,卷積時卷積核從左向右、從上而下的滑動,對應位置求加權和。一般圖像是RGB三通道,需要逐個通道卷積,每個通道是一個二維矩陣。灰度圖隻有一個通道,直接卷積即可。
自行實現的二維離散卷積的python代碼:
def my_conv2d(inputs: np.ndarray, kernel: np.ndarray):
# 計算需要填充的行列數目,這裡假定mode為“same”
# 一般卷積核的hw都是奇數,這裡實現方式也是基於奇數尺寸的卷積核
h, w = inputs.shape
kernel = kernel[::-1, ...][..., ::-1] # 卷積的定義,必須旋轉180度
h1, w1 = kernel.shape
h_pad = (h1 - 1) // 2
w_pad = (w1 - 1) // 2
inputs = np.pad(inputs, pad_width=[(h_pad, h_pad), (w_pad, w_pad)], mode="constant", constant_values=0)
outputs = np.zeros(shape=(h, w))
for i in range(h): # 行號
for j in range(w): # 列號
outputs[i, j] = np.sum(np.multiply(inputs[i: i + h1, j: j + w1], kernel))
return outputs
scipy中已經提供二維卷積函數scipy.signal.convolve2d,可以直接調用,下圖是和自行實現的對比效果。
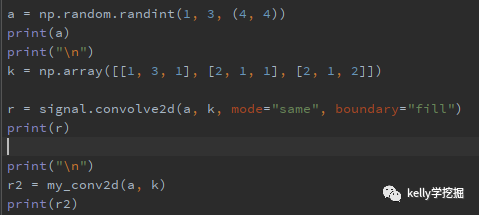
運行之後結果一致,驗證自行實現的二維卷積正確。

補充:scipy.signal.convolve2d的參數說明
in1:輸入矩陣
in2:卷積核
mode:指示輸出矩陣的尺寸,full代表完全離散線性卷積, valid代表輸出尺寸等於輸入尺寸-卷積核+1, same代表輸出尺寸與輸入尺寸一致。
boundary:需要填充時邊界填充方式,fill代表使用常量值填充, wrap代表循環方式填充, symm代表以四周邊為對稱軸對稱填充。
fillvalue:常量填充時的填充值
(四)完整代碼和運行效果
完整的python代碼
class GaussianBlur(object):
def __init__(self, kernel_size=3, sigma=1.5):
self.kernel_size = kernel_size
self.sigma = sigma
self.kernel = self.gaussian_kernel()
def gaussian_kernel(self):
kernel = np.zeros(shape=(self.kernel_size, self.kernel_size), dtype=np.float)
radius = self.kernel_size//2
for y in range(-radius, radius + 1): # [-r, r]
for x in range(-radius, radius + 1):
# 二維高斯函數
v = 1.0 / (2 * np.pi * self.sigma ** 2) * np.exp(-1.0 / (2 * self.sigma ** 2) * (x ** 2 + y ** 2))
kernel[y + radius, x + radius] = v # 高斯函數的x和y值 vs 高斯核的下標值
kernel2 = kernel / np.sum(kernel)
return kernel2
def filter(self, img: Image.Image):
img_arr = np.array(img)
if len(img_arr.shape) == 2:
new_arr = signal.convolve2d(img_arr, self.kernel, mode="same", boundary="symm")
else:
h, w, c = img_arr.shape
new_arr = np.zeros(shape=(h, w, c), dtype=np.float)
for i in range(c):
new_arr[..., i] = signal.convolve2d(img_arr[..., i], self.kernel, mode="same", boundary="symm")
new_arr = np.array(new_arr, dtype=np.uint8)
return Image.fromarray(new_arr)
def main():
img = Image.open("Jeep-cd.jpg").convert("RGB")
img2 = GaussianBlur(sigma=2.5).filter(img)
plt.subplot(1, 2, 1)
plt.imshow(img)
plt.subplot(1, 2, 2)
plt.imshow(img2)
# dpi參數維持圖片的清晰度
plt.savefig("gaussian.jpg", dpi=500)
plt.show()
pass
代碼運行效果,發現經高斯模糊處理之後,圖片發生明顯模糊。


到此這篇關於python實現高斯模糊及原理詳解的文章就介紹到這瞭,更多相關python 高斯模糊內容請搜索WalkonNet以前的文章或繼續瀏覽下面的相關文章希望大傢以後多多支持WalkonNet!
推薦閱讀:
- Python+OpenCV 實現簡單的高斯濾波(推薦)
- Python實現邊緣提取的示例代碼
- Python手動實現Hough圓變換的示例代碼
- Python圖像特效之模糊玻璃效果
- OpenCV-Python實現油畫效果的實例