基於OpenCV的攝像頭測距的實現示例
前言
去年暑假參加瞭一個比賽,比賽內容中需要確定目標的位置 本來想全用圖像完成的,最後發現不是很符合要求。比完賽之後,就忙別的事瞭。直到現在突然想試試攝像頭測距。就來瞭
一、測距原理
攝像頭單目測距原理及實現
空間的深度或距離等數據的攝像頭。
人的眼睛長在頭部的前方,兩隻眼的視野范圍重疊,兩眼同時看某一物體時,產生的視覺稱為雙眼視覺。
雙眼視覺的優點是可以彌補單眼視野中的盲區缺損,擴大視野,並產生立體視覺。
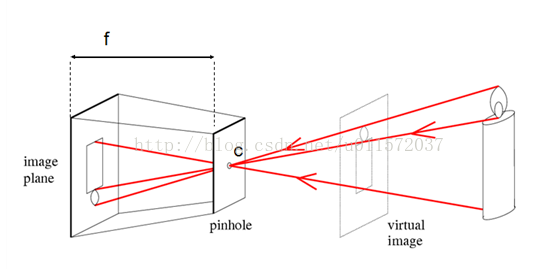
f為攝像頭的焦距,c為鏡頭光心
模型的主要依據公式為f/d=h/H,設物體所在平面與相機平面的距離為d,物體實際高度為H,在傳感器上的高度為h
根據這個模型,我們就能求出目標物體與我們的攝像頭平面的距離。
分兩種情況,但是這兩種情況的條件都是假設實際物體與攝像機所在平面平行。
一種是當物體主線段過光心的情況,這種情況是最容易計算的, 即 h=sqrt ((橫坐標之差*Dx)2+(縱坐標之差*Dy)2), Dx為每個像素的寬度,Dy為每個像素的高度,
二、代碼
1.引入庫
代碼如下(示例):
import cv2 from cvzone.HandTrackingModule import HandDetector import math import numpy as np import cvzone
2.讀入數據
調用電腦攝像頭,或者外接別的攝像頭也可以
調用 cvzone 自帶的手部檢測器
cap = cv2.VideoCapture(0) cap.set(3, 1280) cap.set(4, 720) detector = HandDetector(detectionCon=0.8, maxHands=1)
編寫函數,轉化為距離循環打印顯示
while True:
success, img = cap.read()
hands = detector.findHands(img, draw=False)
if hands:
lmList = hands[0]['lmList']
x, y, w, h = hands[0]['bbox']
x1, y1 = lmList[5]
x2, y2 = lmList[17]
distance = int(math.sqrt((y2 - y1) ** 2 + (x2 - x1) ** 2))
A, B, C = coff
distanceCM = A * distance ** 2 + B * distance + C
print(distanceCM, distance)
cv2.rectangle(img, (x, y), (x + w, y + h), (255, 0, 255), 3)
cvzone.putTextRect(img, f'{int(distanceCM)} cm', (x+5, y-10))
cv2.imshow("Image", img)
cv2.waitKey(1)
完整代碼
import cv2
from cvzone.HandTrackingModule import HandDetector
import math
import numpy as np
import cvzone
cap = cv2.VideoCapture(0)
cap.set(3, 1280)
cap.set(4, 720)
# Hand Detector
detector = HandDetector(detectionCon=0.8, maxHands=1)
# Find Function
# x is the raw distance y is the value in cm
x = [300, 245, 200, 170, 145, 130, 112, 103, 93, 87, 80, 75, 70, 67, 62, 59, 57]
y = [20, 25, 30, 35, 40, 45, 50, 55, 60, 65, 70, 75, 80, 85, 90, 95, 100]
coff = np.polyfit(x, y, 2) # y = Ax^2 + Bx + C
while True:
success, img = cap.read()
hands = detector.findHands(img, draw=False)
if hands:
lmList = hands[0]['lmList']
x, y, w, h = hands[0]['bbox']
x1, y1 = lmList[5]
x2, y2 = lmList[17]
distance = int(math.sqrt((y2 - y1) ** 2 + (x2 - x1) ** 2))
A, B, C = coff
distanceCM = A * distance ** 2 + B * distance + C
print(distanceCM, distance)
cv2.rectangle(img, (x, y), (x + w, y + h), (255, 0, 0), 3)
cvzone.putTextRect(img, f'{int(distanceCM)} cm', (x+5, y-10))
cv2.imshow("Image", img)
cv2.waitKey(1)
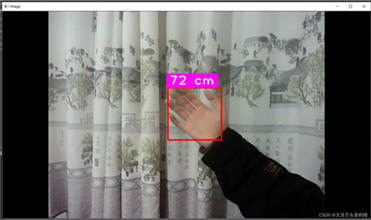
效果圖:
總結
通過簡單的幾行代碼,就可以實現視頻測距。我是以手為檢測目標測距,當然你也可以,調用別的分類檢測器,搭配目標檢測網絡實現各種物體的檢測 測距。(建議備一個,高清的攝像頭。)
本項目的視頻測距的 誤差 大概在±2cm左右。
到此這篇關於基於OpenCV的攝像頭測距的實現示例的文章就介紹到這瞭,更多相關OpenCV攝像頭測距內容請搜索WalkonNet以前的文章或繼續瀏覽下面的相關文章希望大傢以後多多支持WalkonNet!
推薦閱讀:
- OpenCV利用手勢識別實現虛擬拖放效果
- 使用 OpenCV 開發虛擬鍵盤的方法
- Python+OpenCV實戰之拖拽虛擬方塊的實現
- Opencv圖像處理之詳解掩膜mask
- 詳解在OpenCV中如何使用圖像像素